Робот едет вперед 5 оборотов, затем поворачивает направо, данные с гироскопического датчика передаются на монитор. от в программном коде ошибок не обнаружено повороты определяются блоком «Рулевое управление» неверно определен режим у гироскопического датчика блок «Независимое управление» должно стоять на третьем месте, после блока «Рулевое управление»
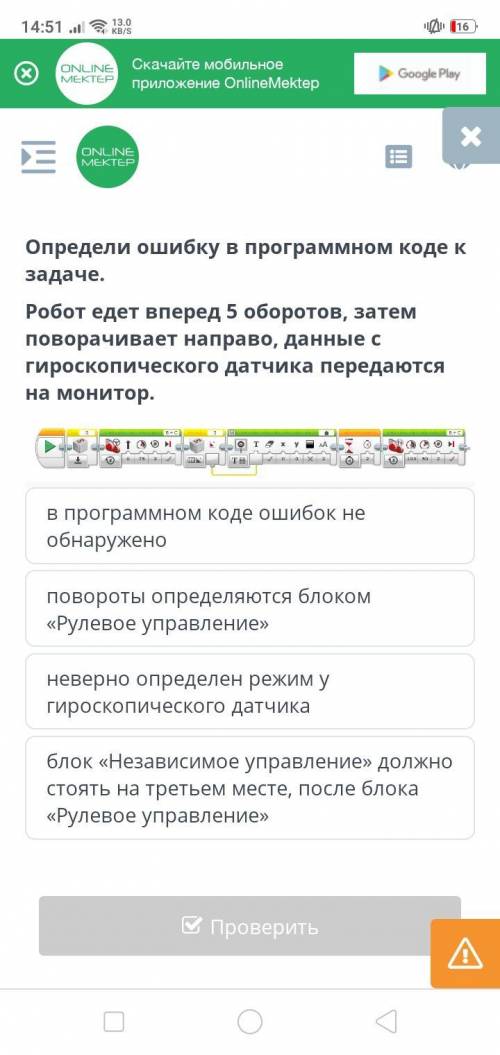
ответ:блок «Независимое управление» должно стоять на третьем месте, после блока «Рулевое управление»
Объяснение: проверено, не рили я это на угад сделала
На фото ответ , сорри если у вас не правильно :(